Als Basis für den Tauchroboter dient ein Arduino Mega 1280. Für diesen haben wir eine Adapterplatine entwickelt, die die geforderten Steckverbindungen bereitstellt.


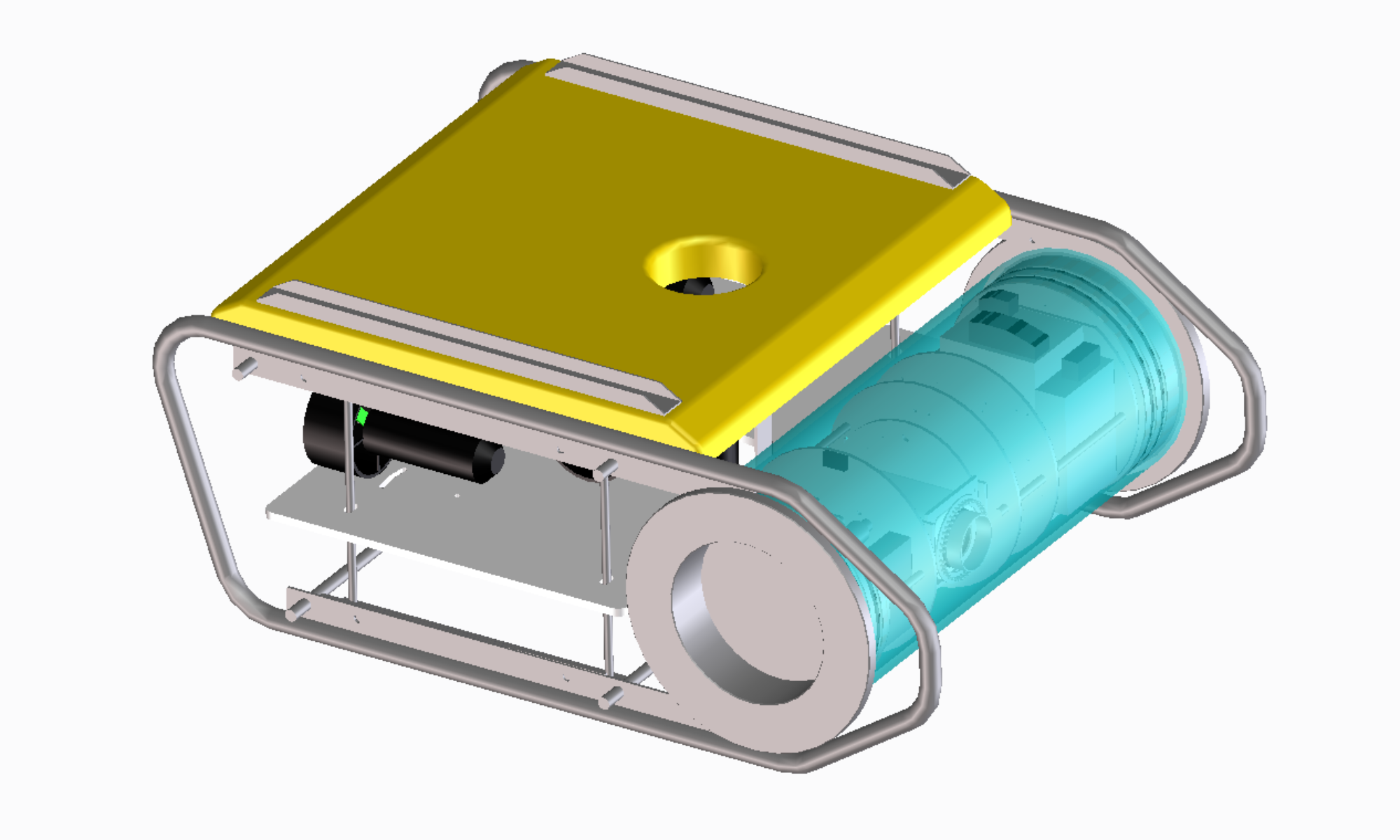
Tauchroboter
Als Basis für den Tauchroboter dient ein Arduino Mega 1280. Für diesen haben wir eine Adapterplatine entwickelt, die die geforderten Steckverbindungen bereitstellt.